23 июня 2013
Делаем робота ВаллИ

Примечание переводчика: робот офигенно умный! Обязательно посмотрите видео под катом!
Первое небольшое введение смотрите тут — www.youtube.com/watch?v=OJiMUzJHYFk
Я начал с игрушки «Интерактивный ВаллИ». Текущая цена на toys'r'us составляет $34.99.
Я увлекаюсь роботами и у меня есть большой опыт в программировании и дизайне, чтобы дать роботам эмоции и жизнь. Первый совет, который я могу дать вам, — вы должны быть уверены. Второй совет — будьте креативным. Используйте их вместе, а всё остальное ваш ум сделает за вас :)
В магазинах есть много доступных запчастей. Моя мастерская не представляет из себя ничего особенного. Я стараюсь закупать те детали, которые подешевле. Иногда я разбираю другие игрушки, потому что сервоприводы, к сожалению, самые дорогие из всех запчастей :)
Для крепежа я использую кабельные стяжки, а также маленькие винтики, болтики и гаечки. Все они доступны в дешёвых наборах для сборки в местном магазине.
Чтобы изменять корпуса, я использую инструменты Dremel, а иногда и свой паяльник, чтобы расплавить пластмассу. При шлифовке, пожалуйста, имейте пылесос поблизости. Внимание: При плавке, держите открытым окно с вентилятором!
Кроме того, если вы решаете расплавить пластик, пожалуйста, используйте отдельную насадку на паяльник.
Теперь о программной части… На самом деле это очень просто. Я программирую своих роботов с использованием EZ-Robot Project и EZ-B EZ-B Robot Controller. Они почти не требуют никакого программирования. Вы можете просто подключить серводвигатели и управлять роботом с вашего ПК. Они также содержит распознавание голоса и кучу других полезных вещей. Вы можете получить их здесь: www.ez-robot.com.
Вот видео сВаллИ в действии…
А вот милое видео, где ВаллИ упал, преследуя свой мяч :)
Вот ещё старое видео моей первой версии
Шаг 1. Материалы

Хорошо, я надеюсь, что вы нашли хорошее место, чтобы начать работу. Стол должен быть таким, чтобы его не жалко было прожечь/поцарапать/испачкать (Проще говоря, не используйте свой обеденный стол!)
Вот список вещей, которые я использовал…
1 EZ-B с SDK или EZ-Builder software
www.ez-robot.com
2 сервопривода для трансмиссии
www.hvwtech.com/products_view.asp?ProductID=114
1 стандартный сервопривод для головы (движения вправо и влево)
www.hvwtech.com/products_view.asp?ProductID=878
2 сервопривода для рук (движения вверх и вниз)
www.hvwtech.com/products_view.asp?ProductID=863
1 сервопривод на наклон головы
www.hvwtech.com/products_view.asp?ProductID=862
2 аналоговых датчика расстояния
www.hvwtech.com/products_view.asp?ProductID=88
Несколько 3-проводных кабелей
www.hvwtech.com/products_view.asp?ProductID=690
1 ящик винтов/болтов/гаек
Доступно в местном хозяйственном магазине
Клеевой термопистолет
Доступно в магазинах для хобби
1 бутылка супер-клея (наверное, у нас это будет клей «Момент» — прим. перев.)
Или любой другой хороший клей для пластика
1 паяльник
Я использую паяльники с регулируемой температурой, которые стоят дорого, но в данном случае рекомендуются. Иногда можно встретить их в интернет-магазинах.
1 набор часовых отвёрток
Обычно продаются они в пластиковых коробочках с прозрачным верхом
Шаг 2. Разберите игрушку

Используя отвёртку, разберите игрушку. Запоминайте что где было, потому что нам нужно будет её собрать обратно.
Примечание: Не стоит разбирать глаза.
Шаг 3. Руки
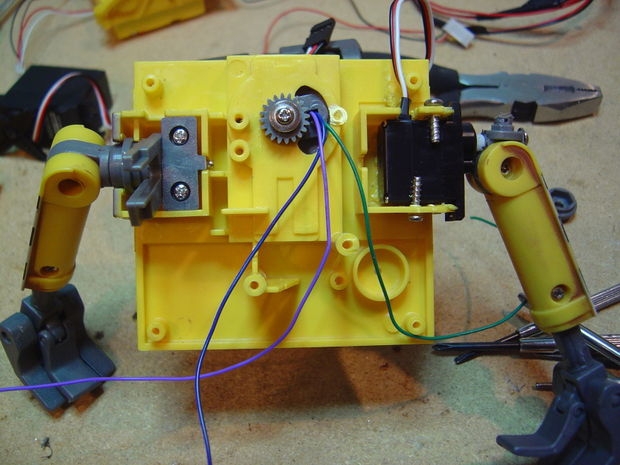
Вам нужно смонтировать сервоприводы на верхней части корпуса игрушки. Это будет вашей первой модификацией тела.
Фото показывает, как установлен серворуль и оригинальный механизм.
Используйте Dremel, чтобы срезать пластик на концах. Убедитесь, что вы используете низкую скорость.
— Я использовал клей-пистолет, чтобы создать красивую плотную посадку для сервоприводов.
— Я сделал два крошечных отверстия в пластике, чтобы вкрутить винты для надёжности.
Монтаж рук на сервоприводы немного сложнее. У меня нет чёткой фотографии того, как я это сделал.
Кроме того, когда вы поняли, как монтировать руку, убедитесь, что серво и руки находятся в центральном положении. Потому что серво не вращается на 360 градусов.
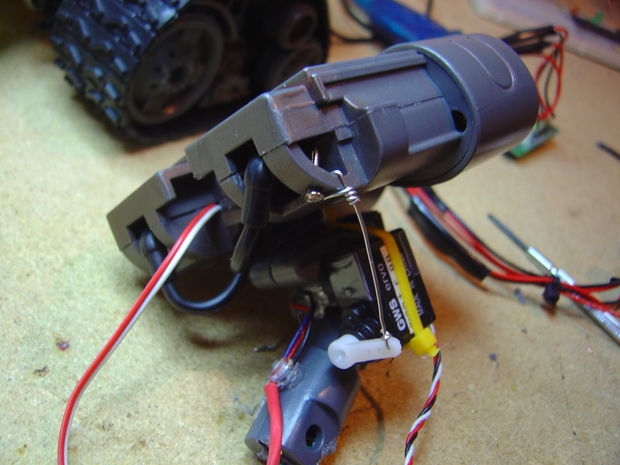
Шаг 4. Установка головы и шеи

Шея будет монтировать на серво GWS стандарта. Это позволит ей двигаться влево и вправо.
Примечание: Как и руки, серво должна быть по центру ;)
Я использовал сочетание Dremel с паяльником, чтобы сгладить адаптер шеи. Я проплавил 3 небольших отверстия для установки винтов на сервопривод.
Для установки серво и кронштейна на голову, вы должны будете сделать отверстие побольше.
Вначале я закрепил шею кабельными стяжками, но потом поставил болт и гайку.
Шаг 5. Привод. Часть 1
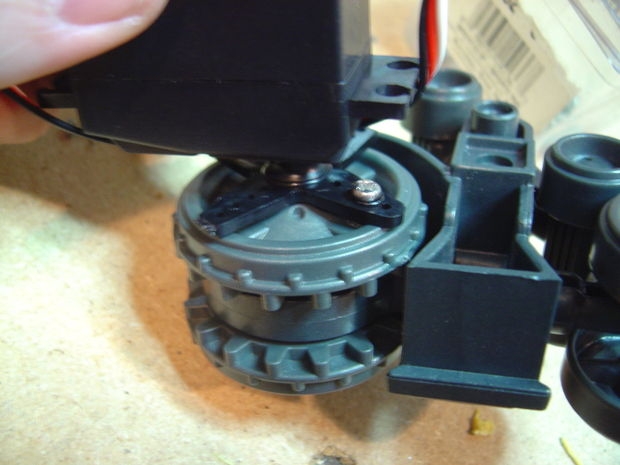
Теперь давайте дадим ВаллИ колеса!
Игрушка не имеет никакого двигатели или трансмиссии. Таким образом, вам придётся сделать его самим.
Изгиб и поворот колёс до металлической оси отрываются. Я закончил с использованием Dremel и резки большинства пластиковых деталей. В любом случае вы захотите, чтобы колёса внутри были плоскими, так что не волнуйтесь :)
Теперь мы собираемся просто вырвать из центра колпачок на колесах. Это позволит вытащить винт. После этого колеса распадутся на части.
Если какая-то часть сервопривода торчит наружу, то отрежьте его с использованием инструмента Dremel.
На обеих сторонах одно и то же… Посмотрите на фото :)
Шаг 6. Привод. Часть 2
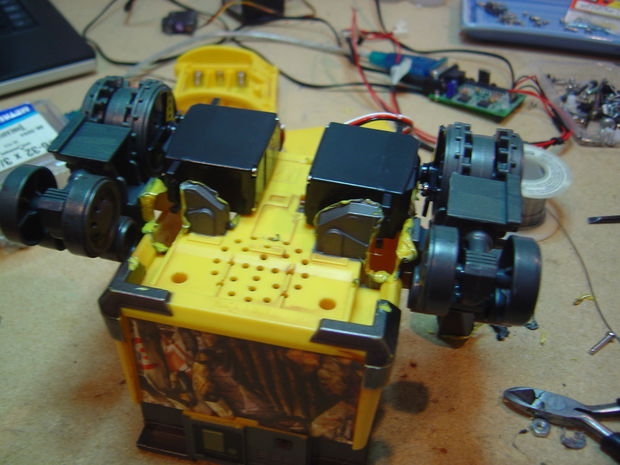
Хорошо, теперь мы будем монтировать трансмиссию к телу.
Внимательно посмотрите на картинку, чтобы увидеть, сколько отрезать.
Лучше всего на этом шаге не торопиться. Я использую маркер, чтобы наметить, где резать.
После прикрепите сервоприводы монтажным кронштейном. После приклейте их горячим клеем.
Чтобы надежно крепление сервомашинки, я использовал кабельные стяжки.
Шаг 7. Датчик расстояния

Я полагаю, что вы хотите, чтобы ваш ВаллИ мог видеть.
Я установил с помощью Dremel датчик расстояния на его шею.
Провода, которые идут вместе в датчиком, очень малы и легко ломаются. Я заменил их 3-кабельные провода, о которых шла речь на первом шаге.
Шаг 8. Наклон головы
Ничто не делает ВаллИ более живым, чем поворот головы. Это добавляет определённые черты в его личность.
Я соединил обе части глаз, чтобы они вращались вместе. Но вы можете так не делать, чтобы ВаллИ выглядел немного смешнее (и страшнее — прим. перев.)
ПРИМЕЧАНИЕ: Не пытайтесь двигать эту крошечную серво вручную! Вы сломаете пластиковые шестерёнки внутри. Поверьте мне, я уже сломал их один раз, пытаясь сделать это.
Шаг 9. Программирование
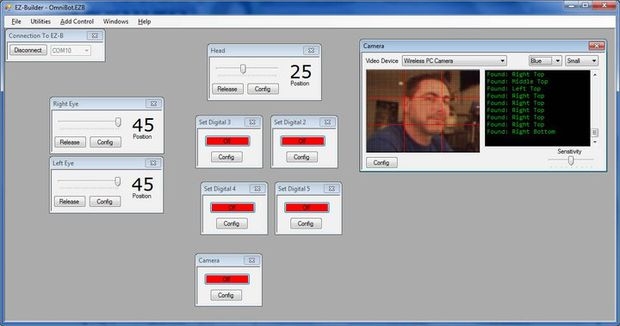
Эта часть не самая сложная, поскольку я использую EZ-Robot Project. Это плата контроллера робота, которая подключается к компьютеру через Bluetooth. Плата поставляется с программным обеспечением, которое называется EZ-Builder. Программное обеспечение позволяет управлять роботом без необходимости программировать. Вы также можете добавить множество других функций, включая распознавание голоса.
Вот несколько ссылок для начала…
EZ-Builder: www.ez-robot.com/EZ-Builder/
Дополнительные модули: www.ez-robot.com/Add-Ons/
Форма для ответов: www.ez-robot.com/Community/Forum
Как работать с серво: www.ehow.com/how-does_4970258_how-servo-motor-works.html
Шаг 10. Робот ваш!

Мой ВаллИ создает двух-мерные карты объектов вокруг него. Это мешает ему застрять или врезаться во что-нибудь. Это реализуется очень сложно.
Кроме того его движения не являются случайными, а зависят от происходящего. Всё это я сделал на основе многих лет наблюдения и программирования.
Шаг 11. Батарейка

Мой ВаллИ потребляет очень мнго энергии, потому что он имеет 6 сервоприводов и микроконтроллеров.
Из-за ограничений по размеру, я был ограничен небольшим аккумулятором.
Мой выбор пал на LION аккумулятор на 2000mha 7,4 вольта. Эта батарея дает моему ВаллИ около 60 минут жизни без подзарядки.
Шаг 12. Наслаждайтесь!


Комментарии 0