03 августа 2013
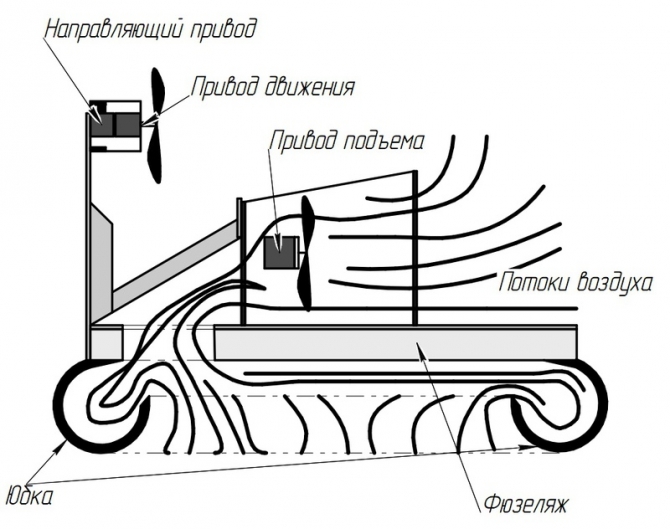
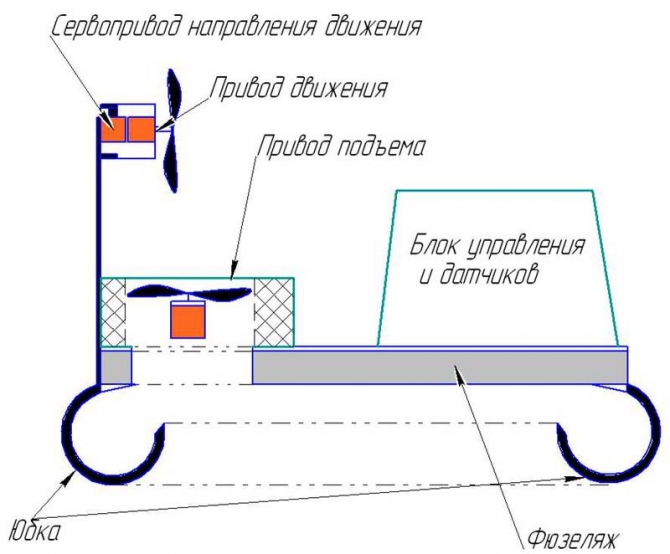
Судно на воздушной подушке «Лунь»

Но в нашей статье пойдет речь не только о создании воздушной подушки, а еще и придании ей полезных функций.
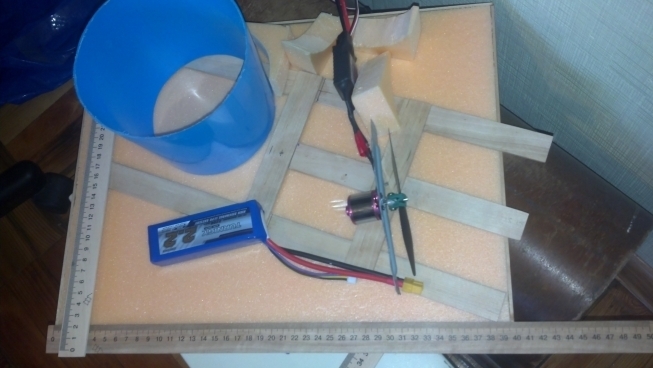
После утверждения первого варианта конструкции началось самое интересное — создание из подручных материалов рабочего образца. Судно решили делать размером чуть больше ноутбука. Пенополистироловый лист, детское ведерко и линейки были куплены на ближайшем рынке, а электроника заказана с hobbyking.
Список покупок:
— GWS EP Propeller (DD-5030 127x76mm) — винт;
— P2632 Brushless Outrunner 3800kv — подъемный двигатель;
— Birdie 50A Brushless ESC w/ 3A BEC — регулятор скорости;
— Turnigy 2200mAh 3S 20C Lipo Pack — источник питания;
— Turnigy balancer & Charger 2S-3S — зарядка для батареи;
— Hobbyking 60w Power Supply — блок питания для зарядки;
— HK15168 Coreless Analog Micro Servo 8g / 1.2kg / 0.12s — сервопривода;
Первая собранная конструкция оказалась хоть и рабочей, но имела ряд недостатков:
— плохая балансировка;
— сильный шум от подъемного двигателя;
— недостаток места для установки периферии.
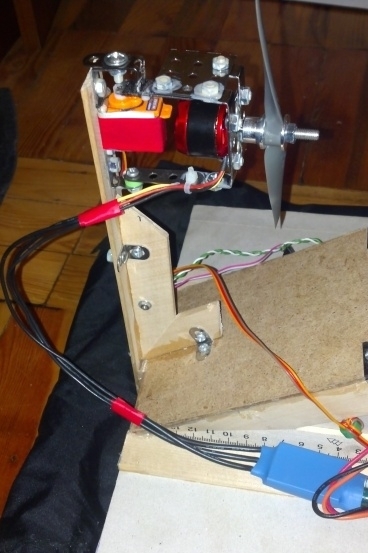
В добавок к этому мы рассчитывали, что отбора мощности хватит и на движение, и на подъем судна. Но наши надежды не оправдались, пришлось докупать еще один двигатель и закрывать отверстие для отбора мощности.
В результате модификации к корпусу добавилась мачта с сервоприводом:
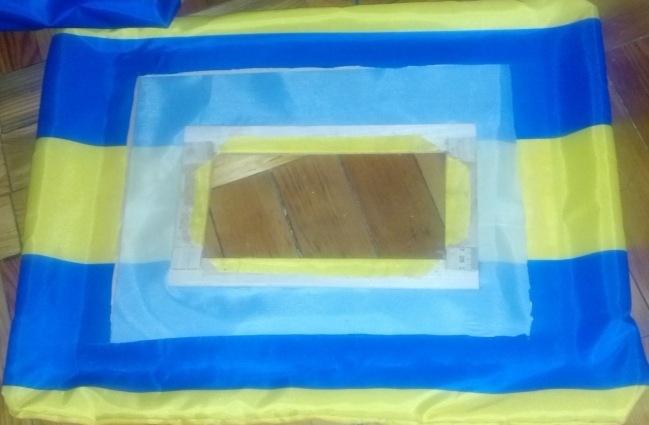
Первые испытания показали неудачную конструкции подушки. Поскольку она делалась из того, что было, а был у нас старый зонтик, то эта подушка имела свойство загибаться под судно. Управление было организовано через stm32vldiscovery и пульт от радиоуправляемой машинки. Так же тест выявил, что дистанция работы пульта очень низка и мы решили установить блютуз модуль.
Фотография юбки отдельно от корпуса
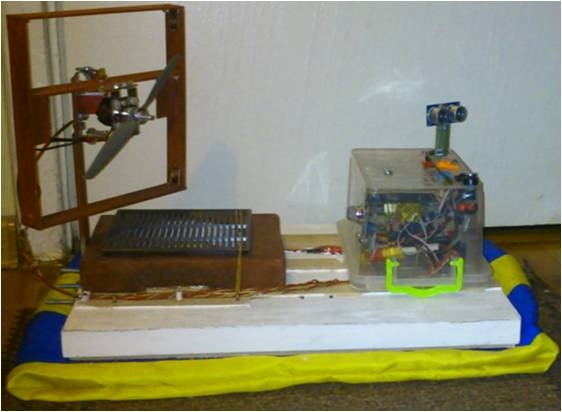
Результат очередных модификаций

Написанная на скорую руку программа (пять кнопок и ничего лишнего) решила некоторые проблемы. Но все равно состояние судна на тот момент не сходилось с нашими идеями и задумками и мы решились на более серьезную модификацию.
Лунь 2.0
Кроме смены компоновки изменениям подверглась схема управления. STM32VLDiscovery был заменен на STM32F3Discovery. Причиной стало наличие акселерометра, гироскопа и магнитометра у stmf3.
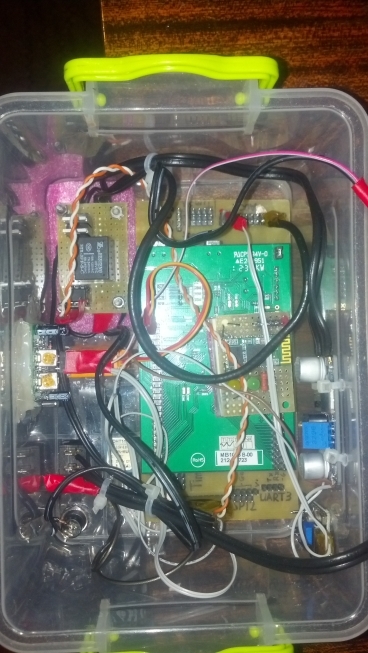
Вот такой вот бутерброд получился:

Так же были докуплены датчики:
— ультразвуковой датчик расстояния HC-SR04;
— датчик влажности и температуры DHT11;
— ик-датчик присутствия HC-SR501;
— датчик газа MQ-2.
А для питания датчиков DC-DC преобразователь на микросхеме LM2596. Так же была реализована система автоматического отключения питания на основе тиристора и размыкающего реле.
Внутренности робота на текущий момент:
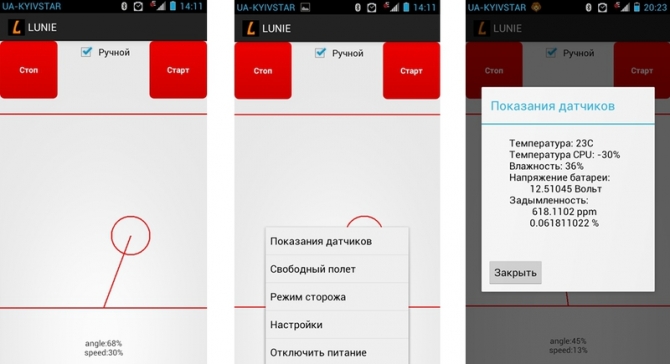
Красный кружок — место прикосновения. Движением пальца вверх-вниз регулируется скорость, а влево-вправо направление тягового двигателя.
Демонстрация результатов:
О режимах работы:
— “Режим сторожа” — робот ждет пока в зоне видимости не появится человек, после чего отсылает сигнал на пульт управления;
— “Пошаговый режим” — робот сканирует УЗ датчиком пространство перед ним, после чего выбирает маршрут и начинает по нему двигаться;
— “Ручное управление” — робот управляется полностью с пульта, никаких корректировок движения не производит;
— “Полуавтоматический режим” — робот управляется с пульта но в движении корректирует полет.
Послесловие
Создать это СВП было прежде всего интересно но использовать его как робота (а это было нашей целью) сомнительное удовольствие. Для квартиры этот робот слишком шумный, а по огороду ездить он не сможет. Впрочем, собранная в этом проекте система управления, на колесном или гусеничном роботе будет работать еще лучше, а если добавить еще пару двигателей, то и квадракоптер можно сделать.
- Evgeniy
- 25 марта 2014, 13:26
- 0
Довольно интересное изобретение, ничего не скажешь. Правда, хорошего практического использования этого робота я не вижу.


Комментарии 1